发表时间:2021/06/08 03:29:38 浏览次数:2268
渔船导航仪器设备是指渔船测向、测距、定位等导航仪器设备的总称。常用的有罗经、航海雷达、劳兰定位系统、奥米加定位系统、导航卫星定位系统等。
罗经
用以确定航向和观测物标方位。分磁罗经和电罗经两类,以磁罗经应用最为普遍。大型渔船同时装有两种罗经。磁罗经是利用自由支持的磁针,在地磁作用下能稳定指向地磁北极。但因同时受地磁和船磁的影响,存在着磁差和自差,故磁针不能指向地球真北。需用磁棒校正磁差。按磁罗经的结构分,有干罗经和湿罗经;按用途分,有标准罗经、驾驶罗经、应急罗经和艇用罗经等。电罗经(又称陀螺罗经)是利用高速旋转的陀螺仪具有稳定指向特性而制成的。它与磁罗经相比,具有指向稳定、不受磁场干扰和误差小等优点。电罗经有多种型式,均由主罗经、分罗经、电源转换器和操纵箱等组成。电罗经的主要部件是陀螺仪,它由一个高速旋转的转子和支承转子的内环与外环构成(图1)。转子自转轴称主轴,转子和内环可以绕水平轴上下俯仰。转子内环和外环还可以绕垂直轴左右旋转。陀螺仪重心和转动中心重合,在没有外力矩时,主轴可指空间任何方向,这种陀螺仪称自由陀螺仪。由于地球自转,主轴不能稳定指向北极,故需加控制力矩和阻尼力矩两个外力矩。使用时,因受各种因素影响而产生船速误差、纬度误差和摇摆误差等。前两种误差可由误差校正器进行校正;摇摆误差已在电罗经结构上给以考虑。
航海雷达
利用电磁波具有直线前进、定速和遇物标有反射回波等特性,可在海上探测物标、测定物标方位和距离以及渔船定位、避碰等。它由天线、发射机、接收机、显示器和电源等组成。它发射超高频脉冲波,测定回波的方位和距离,并在荧光屏上显示图像。特别在夜间、雾天和恶劣天气情况下效果显著。用于船上的雷达主要有导航雷达和避碰雷达。①导航雷达又分相对运动雷达和真运动雷达两种。前者的特点是本船位置不动,固定在荧光屏中心点,所有物标的移动都表现为对本船的相对运动。后者可在荧光屏上直接反映船舶运动的真实情况。如将本船的罗经航向和计程仪的航速信息输入显示器,则渔船的位置在移动,而物标的位置不变,从而显示真实的运动。②避碰雷达是在相对运动雷达或真运动雷达上附加一套避碰标志的装置,可同时显示若干个标志,每个避碰标志的方位和距离可单独调节。使用时可将标志调到物标上,观察它的移动情况来判定是否与本船有碰撞危险。现代避碰雷达可同时显示24个避碰标志,且对其中任何一个标志都可进行单独观察。
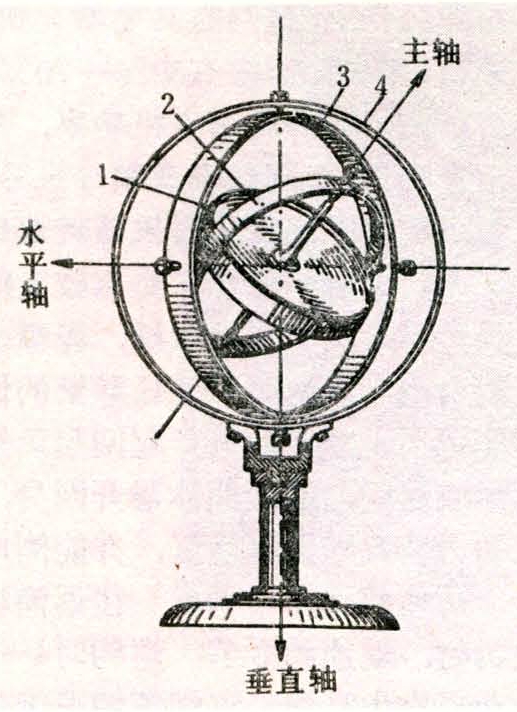
图1 陀螺仪结构示意图
劳兰定位系统
利用测定两个或两个以上劳兰台对所发射的脉冲信号到达船舶的时间差确定船位。属于脉冲双曲线导航系统。有劳兰-A和劳兰-C两种:①劳兰-A。由两个发射台为一对,一个为主台,另一个为副台,主台控制副台,副台在接收到主台脉冲后,经过一定时间的延迟,再发射副台脉冲,必须有两条或两条以上的船位线相交,才能确定船位,故需建立两对或两对以上主副台(图2)。当劳兰-A接收机接收到A、B两台发射的脉冲信号后,精确测定两个发射台脉冲信号到达接收机的时间差△tAB,得一条相应的位置线,再测A、C两个发射台的脉冲信号到达接收机的时间差△tAC,得另一条位置线,两条位置线相交的交点F即为船位。劳兰-A的工作频率可分1950、1850、1900和1750千赫四种。为避免众多的发射台使用相同的频率,所以采取改变脉冲重复频率的方法来区别各台对。脉冲重复频率分S、L、H三种基本脉冲重复频率和0~7共8个数字排列组合的特殊脉冲频率。白天地波作用距离为700海里,主要工作区定位精度为1海里。夜间利用天波,作用距离为1400海里,但定位精度下降,使用天波时,必须经过天波修正才能获得准确船位。由于劳兰-A定位精度不高,80年代以来逐渐由劳兰-C所代替。②劳兰-C。在劳兰-A的基础上发展起来的脉冲相位距离差双曲线导航系统。它不但能测定主台和副台发射的信号时差,而且还能测定信号的相位差。工作频率为100千赫,地波作用距离白天1200海里,夜间约1000海里,使用天波不论日夜均达2000海里。定位精度达1/4海里。劳兰-C的基本重复频率除有与劳兰-A相同的S、L、H外,还有SSSL、SH。每个台链有3~5个台组成。各台用同一脉冲重复频率发射,所以只要选择一个脉冲重复频率就能求得多条位置线,接收操作较为简便。此外,劳兰-C采用多脉冲体制发射脉冲,主、副台分别由9个和8个脉冲组成,以示区别。
图2 劳兰-A定位原理图
用劳兰-A或劳兰-C定位时都要利用劳兰-A或劳兰-C的海图或表册,直接或通过计算求得船位。80年代以来,也有通过微机直接显示渔船所处的经纬度。
奥米加定位系统
利用奥米加接收机测量奥米加台组发射信号的相位差进行定位。信号频率为10~14千赫,共有8个台组成。工作范围覆盖全球。奥米加台组发射甚低频信号。它的传播特性较为稳定,所以基线很长,作用距离可达6000海里,双曲线散度小,交角条件较好。通常在一个海区可以接受几个台的信号,从中选择条件好的台进行测定,求得较准确的船位。信号传播速度依电离层高度而变化,因此测定的相位差要根据所在的地点、季节和时间而进行修正,同时测定值还要按月、日、时间进行修正。奥米加的发射频率供定位用的为10.2千赫、供巷识别用的为11.33千赫和13.6千赫,额定功率为10千瓦。标定定位精度为1~2海里。
导航卫星定位系统
由地球人造卫星、卫星地面控制站和船舶卫星信号接收机等组成。有海军导航卫星系统(NNSS系统)和全球定位系统(GPS系统)两种。①海军导航卫星系统。又称子午仪导航系统。该系统运行的卫星原有6颗,现存5颗,是一种低轨道多普勒导航卫星系统,卫星高度约1100千米。约107分钟绕地球一周。当卫星通过船舶所在海区时,才能接收到卫星信号。大约每隔35~100分钟可有一次定位机会。现代使用的卫星导航系统,只要把各时间中所测定的多普勒频移值和当时的推算船位、航向、航速和时间输入卫星接收机,经过电子计算机就可直接显示出该时刻的准确船位。定位精度优于其他导航系统,误差为0.1海里。但该系统存在不连续性和不均匀性等缺点。②全球定位系统。又称导航星系统。是一种中高轨道卫星导航系统。系统全面工作时有18颗卫星,配置在相互夹角为60°的6个轨道面上,高度为2万千米。每颗卫星绕地球运转一周为12小时。可全球连续覆盖,全天候连续定位。在任何时刻、任何地点,观测者能同时接收4颗以上的卫星信号;定位误差只10~100米;定位速度快;抗干扰能力强;信号经编码产生,保密性好。
声明:本站属公益性没有商业目的的网站,上列文章仅供个人学习参考。本站所发布文章为原创的均标注作者或来源,未经授权不得转载,许可转载的请注明出处。本站所载文章除原创外均来源于网络,如有未注明出处或标注错误或侵犯了您的合法权益,请及时联系我们!
欢迎关注本站(可搜索)"养鱼E线"微信公众帐号和微信视频号"养鱼一线"以及头条号"水花鱼@渔人刘文俊"!

